
Biomechanics
We are undertaking basic and applied research into the effects of disease and trauma on joint function.
Surgical Navigation
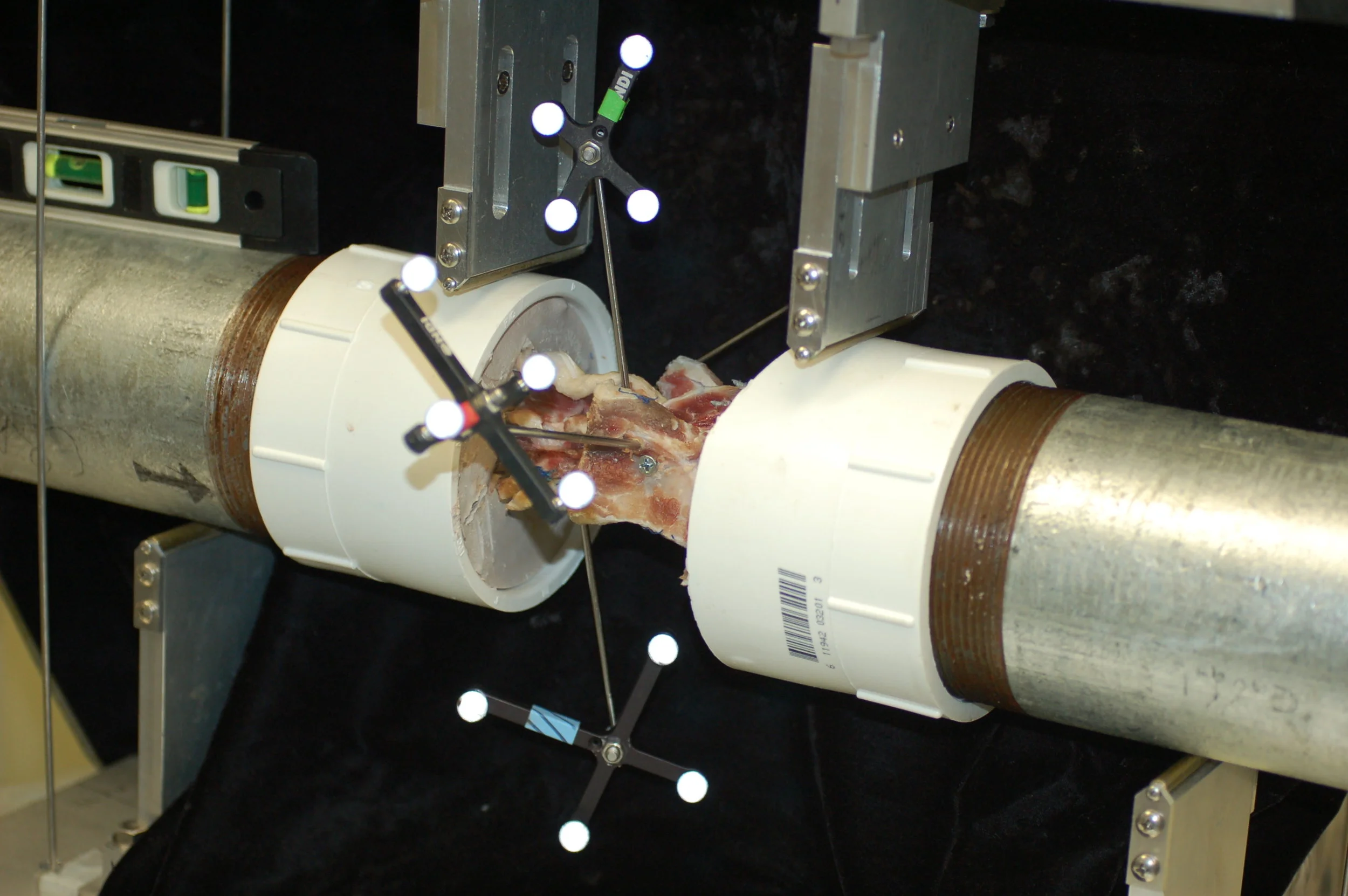
In collaboration with the Department of Engineering, and the hard work of our student on placement Rachel Lewis, we have written a working prototype of a surgical navigation system. The system aims to assist with jig positioning in Tibial Plateau Levelling Osteotomy (TPLO) surgery. It uses an optical tracking system to register the bone then gives the user the live position of the drill compared to a calculated ideal position.
We are now testing it on foam bones to check the precision of the system. Positioning the jig more precisely should help improve outcomes and reduce the chance of complications from surgery.

Projects
Determining the kinetics and kinematics of a dog's forelimb for a complete gait cycle, and using the results to program a robot designed to test the effectiveness of elbow implants.
Design and use of simple surgical navigation systems to improve accuracy during surgery, with particular interest in the placement of the jig pin in canine cruciate ligament surgery.
Using an industrial 6-degree-of-freedom robot to test the effects of total knee replacement surgery on the kinetics and kinematics of the canine knee. The research is also carried out in order to improve the testing protocol, based on the processed data, and to improve the existing prosthesis and methods for treating damaged knee joints in dogs.
The Robot
The Surgical Discovery Centre has recently installed a cutting edge robotic simulator for biomechanics studies. The system, consisting of a KUKA 60-3 robot (https://www.kuka.com) and a dedicated biomechanics software package (SimVitro) developed by the BioRobotics core at Cleveland Clinic in the United States, is due to be installed the week of March 6th, 2017.
Unlike traditional mechanical testing systems, which usually operate in one or perhaps two planes of motion (up and down, to apply tension and compression, or in rotation to apply torque), the new robot is capable of translational and rotational movements around all three axes simultaneously. From a practical perspective, this means that the software drives to the robot to simulate the complexity of movement in both animals and humans. An example of the system's capability to simulate human knee movement can be found on the Cleveland Clinic site (http://mds.clevelandclinic.org/Services/BioRobotics/simVITRO.aspx).
The new simulator will be involved in evaluation of the effects of knee replacement on movement patterns in the canine knee. We then plan to use the robot in a new study to develop a better surgical solution for dogs with elbow disease.
